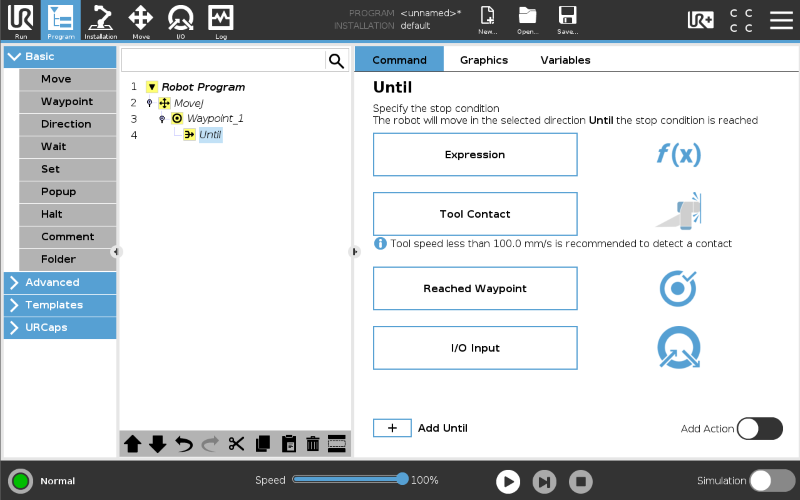
When needing to stop the motion of the robot, instead of using an “If” statement and checking the expression continuously. Use the “Until” feature of the Waypoint.
This feature acts as an “If” or “Else If” statement, meaning you can have multiple until conditions for one Waypoint. The motion will stop when the first until condition is met. Until conditions includes Expression, Tool Contact, Reached Waypoint, and I/O Input.
You can also add an “Action” to an until. Each action is tied to one until, if that until condition is not met then the nodes nested in the action will not execute.