
Having good comments and variable names can make your program much easier to understand. Turbo-charge your typing by plugging a USB keyboard into the robot... Continue reading
Category: Blog: UR
Universal Robot Blogs
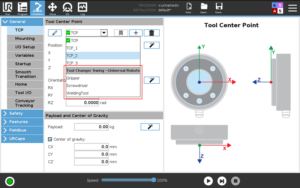
Dual End-Of-Arm-Tooling (EOAT) is commonly utilized to shorten robot movement. When tending a CNC machine, the robot will pick a new part with one gripper... Continue reading
They call it URSim and it’s a simulation of the complete Polyscope software. It is intended for offline programming and simulation of robot movements. The... Continue reading
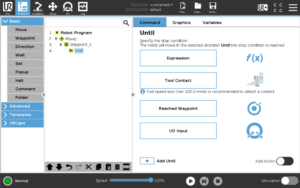
When needing to stop the motion of the robot, instead of using an “If” statement and checking the expression continuously. Use the “Until” feature of... Continue reading

Robotiq’s force co-pilot expands on the ease of use and capabilities of your Universal Robot. The ActiveDrive function takes free drive to a new level... Continue reading